近日,肉漫屋 机电系统控制实验室(MSCL)李世华教授、王翔宇教授团队的研究论文“Hierarchical Consensus of Constrained Second-Order Multi-Agent Systems With Application to Formation of Multiple Mobile Robots”(受限二阶多智能体系统的分层一致性及其在多移动机器人编队中的应用)以长文(Full Paper)形式录用在控制领域两大顶刊之一的《IEEE Transactions on Automatic Control》(IEEE TAC)上。这是团队在非线性协同控制与优化方向继2020年IEEE TAC长文和2024年Automatica长文之后第3篇在控制领域两大顶刊上录用的长文。该论文提出了一种新颖的受限多智能体系统分层协同控制方案。肉漫屋 王翔宇教授为论文的第一作者,李世华教授为通信作者。肉漫屋 为论文的第一作者单位和通信作者单位。该研究得到了国家自然科学基金等项目的资助。
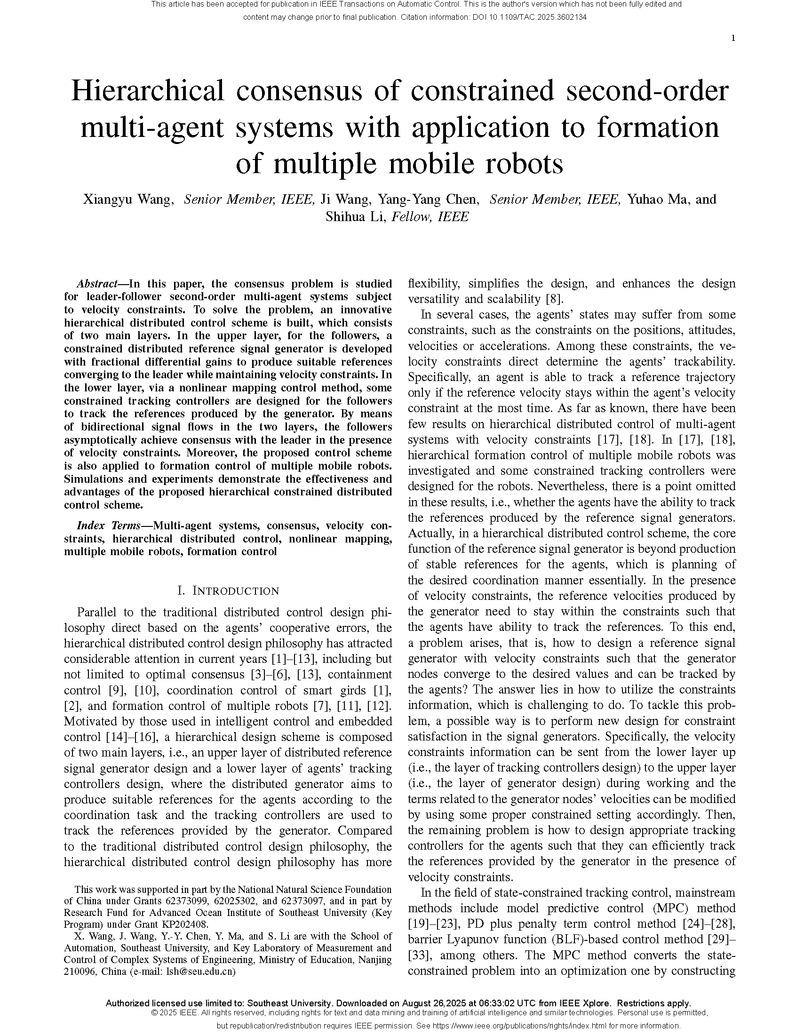
受限多智能体系统分层协同控制方案
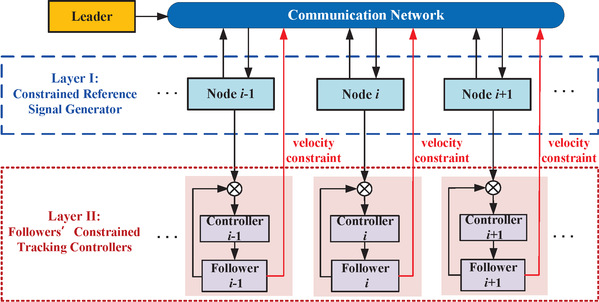
实验图像和各移动机器人在不同时刻的位置、轨迹
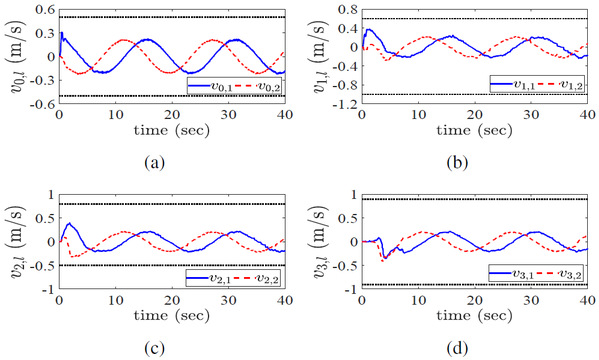
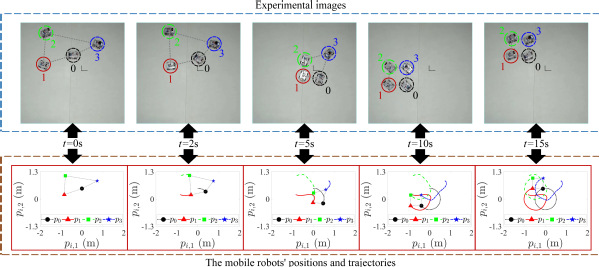
各移动机器人实际速度响应曲线(均满足各自约束条件)
论文基于分层协同控制框架提出了一种新型两层式约束协同控制方案,研究了速度受限领导者-跟随者二阶多智能体系统的一致性问题,具体设计包括约束分布式参考信号发生器设计和各智能体速度约束跟踪控制器设计。所提方案主要具有以下特点:(1) 所提方案具备分层协同控制框架的优点,如高灵活性、低设计复杂度以及强通用性和可扩展性。此外,所提方案提供了一种新颖的双向设计思路,即上层的约束分布式参考信号发生器可有机利用各智能体的速度约束信息,成功将分层协同控制框架的适用范围扩展到受限多智能体系统的协同控制问题;(2) 在考虑速度约束的情况下,设计了一种约束分布式参考信号发生器,该发生器不仅为各跟随者智能体生成与领导者智能体可实现渐近一致性的参考信号,而且考虑了速度约束条件,使由发生器生成的各跟随者智能体参考速度满足各自约束条件;(3) 通过非线性映射控制方法,为各跟随者智能体设计了一种新型约束跟踪控制器,相比于传统方法,所提速度约束跟踪控制器避免了过大控制量且控制器参数选择更灵活。此外,论文也将所提方案应用于速度受限多移动机器人的编队任务中。仿真和实验验证了所提控制方案的有效性和优越性。
论文DOI: 10.1109/TAC.2025.3602134
论文链接://ieeexplore.ieee.org/document/11134797

